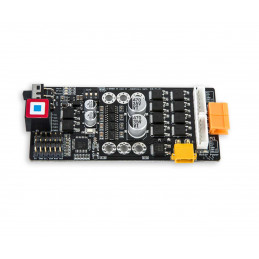
Das Me DC Encoder Motor Driver Modul unterstützt zweikanalige DC-Encoder-Motoren und enthält eine MCU und einen Motortreiber-Chip. Die MCU hat einen eingebauten PID-Algorithmus und implementiert eine genaue Regelung der Geschwindigkeit und Richtung des Motors. Die PID-Parameter des Motors können durch die Software auf der offiziellen Website von Makeblock gesteuert werden, so dass der Motor in verschiedenen Umgebungen die besten Betriebsbedingungen erreicht. Dieses Modul wurde entwickelt, um den Motor einfach, schnell und genau zu steuern. Wenn Sie dieses Modul besser nutzen wollen, zum Beispiel den Selbstausgleichswagen. Sie müssen den PID und einige Parameter anpassen, und dies erfordert, dass der Benutzer eine entsprechende Basis hat. Das Modul kann auch für das Erlernen des PID-Algorithmus angewendet werden, und öffnet den SPI und die serielle Schnittstelle für die Bequemlichkeit der zweiten Entwicklung, so dass es gleichbedeutend mit einem Entwicklungs-Board von kleinen Motor. Seine rote ID bedeutet, dass seine Eingangsspannung 6~12V beträgt und an den Port mit der roten ID am Makeblock Orion angeschlossen werden sollte.
technische Spezifikationen
Motorkanäle: 2
Eingangsspannung: 6V-12V DC
Einkanaliger maximaler Dauerstrom: 1,2A
Einkanaliger Spitzenstrom: 3,2A
MCU-Betriebsspannung: 5V DC
Kommunikationsanschluss: I²C
Auslassöffnung: SPI - serielle Schnittstelle
Motoranschlüsse: M+, M-, GND, 5V, ENC1, ENC2
Betriebstemperatur: -40~85?
Modulgröße: 67,5 x 32 x 18 mm (L x B x H)
Funktionseigenschaften
Die weiße Fläche des Moduls ist die Bezugsfläche für die Kontaktfläche der Metallträger
Position, Geschwindigkeit und Richtung des Motors präzise steuern
Bereitstellung von Echtzeit-Positions- und Geschwindigkeitsrückmeldung
Bestückt mit einem effektiven MOSFET H-Brücken-basierten Motortreiber-IC
Überstromschutz und Anti-Reverse-Schutz
Unterstützung der mBlock GUI Programmierung, und anwendbar für Benutzer aller Altersgruppen
RJ25-Buchse für einfachen Anschluss übernehmen
Zweikanalige Motorfeedback-Vorwärts/Rückwärts-Anzeige mit MCU-Reset-Taste
Mit Pin-Port zur Unterstützung der meisten Entwicklungsboards einschließlich der Arduino-Serie
Prinzip
Der Me DC-Encoder-Motortreiber muss mit dem Encoder-Motor arbeiten. Der Hauptunterschied zwischen Encoder-Motor und DC-Motor ist die Rückmeldung der Motordrehung, die durch den Encoder erreicht wird. Derzeit gibt es 2 Arten von Encodern: magnetische und optische Encoder. Da der Magnetring oder die Kodierscheibe auf der Motorwelle befestigt ist, dreht sich der Magnetring oder die Kodierscheibe mit dem Motor. In der Zwischenzeit erkennt das Erkennungsgerät die Änderungen am Magnetpol oder am optischen Gitter, wandelt die Änderungen in ein Impulssignal um und liefert das Signal schließlich an den Motortreiber des Encoders. Die Umdrehungszahl des Motors kann durch die Berechnung der Zahl des Impulssignals, die Drehzahl des Motors durch die Zahl des Impulssignals pro Zeiteinheit ermittelt werden.
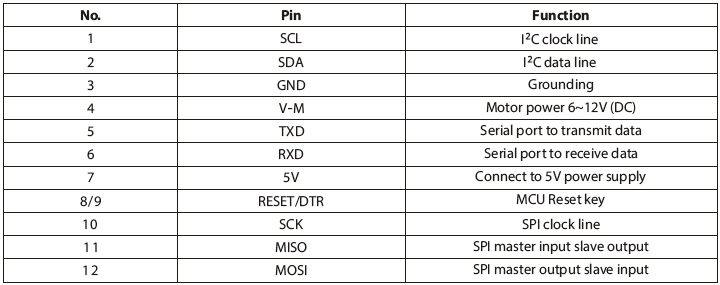
Definitionen der Pins
Der Port des Me DC Encoder Motor Driver hat 12 Pins, und ihre Funktionen sind wie folgt: